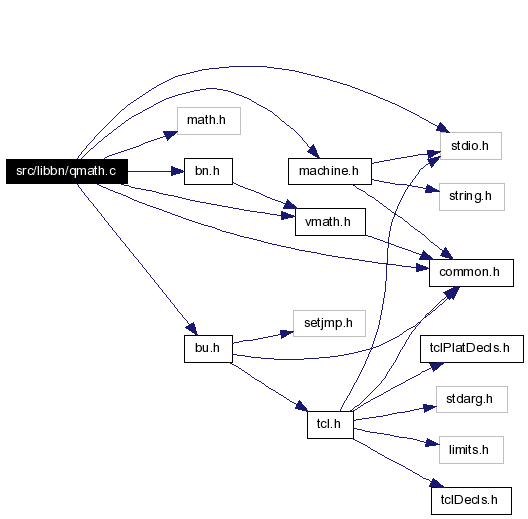
#include "common.h"
#include <stdio.h>
#include <math.h>
#include "machine.h"
#include "bu.h"
#include "vmath.h"
#include "bn.h"
Include dependency graph for qmath.c:
Go to the source code of this file.
Defines | |
| #define | PI 3.14159265358979323264 |
| #define | RTODEG (180.0/PI) |
| #define | XX 0 |
| #define | YY 5 |
| #define | ZZ 10 |
| #define | MMM(a, b) mat[4*(a)+(b)] |
Functions | |
| void | quat_mat2quat (register fastf_t *quat, register const fastf_t *mat) |
| Convert Matrix to Quaternion. | |
| void | quat_quat2mat (register fastf_t *mat, register const fastf_t *quat) |
| Convert Quaternion to Matrix. | |
| double | quat_distance (const fastf_t *q1, const fastf_t *q2) |
| Gives the euclidean distance between two quaternions. | |
| void | quat_double (fastf_t *qout, const fastf_t *q1, const fastf_t *q2) |
| Gives the quaternion point representing twice the rotation from q1 to q2. Needed for patching Bezier curves together. A rather poor name admittedly. | |
| void | quat_bisect (fastf_t *qout, const fastf_t *q1, const fastf_t *q2) |
| Gives the bisector of quaternions q1 and q2. (Could be done with quat_slerp and factor 0.5) [I believe they must be unit quaternions this to work]. | |
| void | quat_slerp (fastf_t *qout, const fastf_t *q1, const fastf_t *q2, double f) |
| Do Spherical Linear Interpolation between two unit quaternions by the given factor. | |
| void | quat_sberp (fastf_t *qout, const fastf_t *q1, const fastf_t *qa, const fastf_t *qb, const fastf_t *q2, double f) |
| Spherical Bezier Interpolate between four quaternions by amount f. These are intended to be used as start and stop quaternions along with two control quaternions chosen to match spline segments with first order continuity. | |
| void | quat_make_nearest (fastf_t *q1, const fastf_t *q2) |
| Set the quaternion q1 to the quaternion which yields the smallest rotation from q2 (of the two versions of q1 which produce the same orientation). | |
| void | quat_print (const char *title, const fastf_t *quat) |
| void | quat_exp (fastf_t *out, const fastf_t *in) |
| Exponentiate a quaternion, assuming that the scalar part is 0. Code by Ken Shoemake. | |
| void | quat_log (fastf_t *out, const fastf_t *in) |
| Take the natural logarithm of a unit quaternion. Code by Ken Shoemake. | |
Unit Quaternions: Q = [ r, a ] where r = cos(theta/2) = rotation amount |a| = sin(theta/2) = rotation axis
If a = 0 we have the reals; if one coord is zero we have complex numbers (2D rotations).
[r,a][s,b] = [rs - a.b, rb + sa + axb]
-1 [r,a] = (r - a) / (r^2 + a.a)
Powers of quaternions yield incremental rotations, e.g. Q^3 is rotated three times as far as Q.
Some operations on quaternions: -1 [0,P'] = Q [0,P]Q Rotate a point P by quaternion Q -1 a slerp(Q,R,a) = Q(Q R) Spherical linear interp: 0 < a < 1
bisect(P,Q) = (P + Q) / |P + Q| Great circle bisector
Definition in file qmath.c.
|
|
Referenced by quat_mat2quat(). |
|
|
Referenced by quat_mat2quat(). |
|
|
Referenced by quat_mat2quat(). |
|
|
Referenced by quat_mat2quat(). |
 1.4.6
1.4.6