User:Phoenix/GSoc2013/Reports
From BRL-CAD
Contents
Log
Community bonding
- May 28
- Create the log page
- Things have done:
- Test program for SSI and a test geometry file
- Some improvement with SSI and API design
- June 3
- As I will have my final exams during the first week that coding begins, so I'd like to move some work ahead.
- Begin to add P/P, P/C and P/S support. Implement ON_PX_EVENT for reporting the intersections.
- TODO: Implement P/C, P/S and ON_PX_EVENT::IsValid().
- June 4
- Eliminate max_dis in the brep command for SSI.
- Extended the brep command to handle P/P, P/C, P/S, C/C and C/S.
- Modified the wiki page of the brep command.
- Fix the format of ON_PX_EVENT::Dump(). (Add "\n")
- June 7
- Try to add PS support using get_closest_point().
- Test the functionality of the PS function - it seems that there's a problem when try (0,0,5) on a sphere of radius 5 and centered at the origin (it should be an intersect, but get_closest_point() returns (0,0,-5) resulting in no intersections).
- June 12
- Calculate point-curve intersection using sub-division.
- Do some simple testing on PCI. It works.
Week 1
- June 17
- Coding period begins!
- Put the tolerance into consideration in the IsPointIn() test in PCI.
- Write a test program on sphere to test P/P, P/C and P/S.
It seems that get_closest_point() is not always robust. :( Maybe it's not a good choice for P/S.
- June 18
- Use macros to represent default tolerance and change it to 0.001 (the same as the default tolerance of curve/curve, curve/surface, surface/surface defined by openNURBS)
- Consider the input u_domain and v_domain for the result of point-surface intersection.
- June 19
- Busy with the course projects and preparing a final exam. Didn't have much time for BRL-CAD.
- June 20
- Found the problem causing get_closest_point() to fail
- get_closest_point() sometimes give us the 'farthest' point.
- => getClosestPointEstimate() didn't work.
- => The surface tree are not built correctly.
- => It seems that we inappropriately prepTrims when m_removeTrimmed is false, causing get_closest_point() to fail. Someone who wrote this code needs to check whether this change is correct.
- Use a smaller depth for PSI to improve performance.
- Found the problem causing get_closest_point() to fail
- June 21
- Added Newton-Raphson iteration in PCI to improve accuracy (using the one from subdivision and linear approximation as a starting point)
- After test, it can work with tolerance set to ON_ZERO_TOLERANCE!
- Added Newton-Raphson iteration in PCI to improve accuracy (using the one from subdivision and linear approximation as a starting point)
Week 2
- June 24
- The plane was delayed for a long time. It took almost the whole day to get to Beijing. :(
- Set removeTrimmed to false, otherwise the surface tree cannot be built correctly - since the last change raised a raytrace problem.
- June 25
- Began to implement curve-curve intersections.
- First using sub-division to find the intersecting bounding boxes.
- Then use Newton-Raphson iterations to get an accurate result.
- Finally check the validity of the solutions and check overlap.
- More tests and improvements are needed.
- Added the new CCI and CSI functions to brep_debug.cpp.
- Began to implement curve-curve intersections.
- June 26
- Improvements and bug fixing of curve-curve intersection
- Add tolerance value in the bounding box intersections.
- Check duplication before appending to the array x.
- In the Newton-Raphson iterations, if the inverse fails, we try another two directions.
- More work on the tolerance value to get a more accurate and correct result.
- Add a test program for curve-curve intersections.
- Improvements and bug fixing of curve-curve intersection
- June 27
- Continued improving curve-curve intersection
- Merge the overlap events that are continuous.
- Eliminate the intersection points that are inside the overlap events.
- Some special handling for linear curves.
- Add another test for overlaps.
- Continued improving curve-curve intersection
- June 28
- More work on CCI
- Assign values to m_a[1], m_A[1], etc. even if it's ccx_point event (according to openNURBS declarations in other/openNURBS/opennurbs_x.h)
- Fixed the wrong curve used in detecting overlaps.
- Added more comments to document the intersection approaches.
- Studied materials on curve-surface intersections and ready to get started.
- More work on CCI
Week 3
- July 1
- Began to implement curve-surface intersections
- Use sub-division and Newton-Raphson iterations.
- It's similar to curve-curve intersections.
- Began to implement curve-surface intersections
- July 2
- Added tests for curve-surface intersections.
- Improved curve-surface intersections
- Check the endpoints of the line segment when computing its intersection with a boundary plane.
- Consider NaN.
- Add fabs() when calculating the line_t.
- Fixed a typo in brep.c ("CS" for curve-surface rather than "PC").
- July 3
- Added another test for CSI (line & torus).
- Continued improving curve-surface intersections.
- Reused surface tree - avoid generating the surface tree again and again.
- Added some special splitting machanism for polylines.
- Comparing doubles cannot use minus directly.
- If the starting point is good enough, we don't need Newton iterations.
- When merging, m_b should be consistent with m_a.
- Values of 3D and 2D spaces should have different tolerances. And consider the 2D tolerance when merging.
- July 4
- Started to work on surface-surface intersections (TDD)
- Did some clean up to the original code.
- Split the two steps (intersecting bounding boxes and triangular approximation).
- Dealt with single points, and checked validity of the solutions.
- Using tests (csgbrep.g): brep sph.brep intersect tor.brep 0 0
- Started to work on surface-surface intersections (TDD)
- July 5
- Improve SSI
- Dealt with surface boundaries (using CSI).
- Some special handling for closed surfaces - added function closed_domain().
- Eliminated duplicated points using a naive approach.
- Improve SSI
Week 4
- July 8
- Continued SSI
- Fixed bugs of triangle intersections - wrong line_normal for B, floating point issues (== is not sufficient), coincident planes cases, and calculate the barycentric coordination with ON_Solve2x2() in case that the inversion fails.
- Calculate max_dis using the length of bounding box diagonal, in case that both volumes are zero.
- Modified brep_debug.cpp and test_ssi.cpp to deal with intersection points (use spheres to represent the points).
- Continued SSI
- July 9
- Uploaded some test images to this log with arb_intersect.g and csgbrep.g
- Use 2D intersection tolerance with the 2D distances.
- Linear fitting with the 2D intersection curves.
- July 10
- Perform Newton iterations to get more accurate surface-surface intersection points. (newton_ssi() in intersect.cpp)
- Fixed a bug in triangle intersections raised by points_on_line.
- More elegant SSI result display.
- Did more tests and uploaded result images. (A problem comes out with the tests, as described below)
Test Results
- src/librt/tests/arb_intersect.g
- Intersection point: brep A_brep intersect B_brep 0 4 (The intersection point is marked with a sphere)
- Intersection curve (a line segment): brep A_brep intersect B_brep 0 1 (The intersection line is marked as green and purple)
- Intersection point: brep A_brep intersect B_brep 0 4 (The intersection point is marked with a sphere)
- csgbrep.g
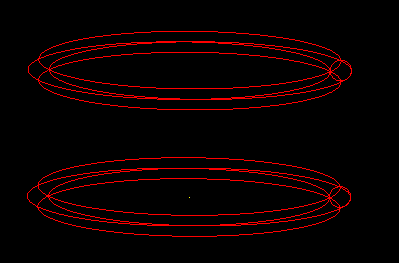
- brep tor.brep intersect sph.brep 0 0
- 2 intersection curves (2 circles)
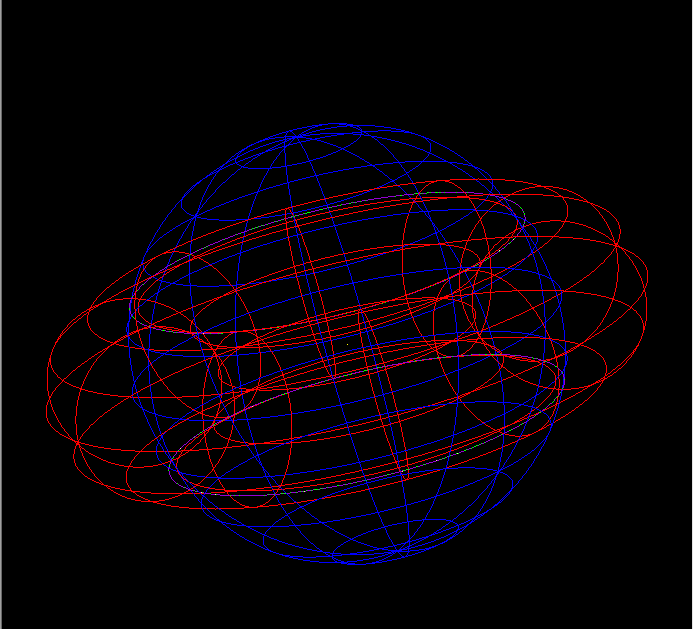
- 3D intersection curves (generated by test_ssi as pipe primitives)
- 2D intersection curves (generated by test_ssi as sketch primitives): as you can see, they are two line segments.
- brep tor.brep intersect sph.brep 0 0
- Intersection of two rcc's (They both have a bottom face that overlaps with each other, and the intersection curve of their side faces is a circle displayed in green.)
- We translate and rotate the blue rcc, and intersect again its side face with the red one's side face, and get a 3D intersection curve. (Displayed in green)








Original development timeline
- - June 17 (~4 weeks)
- Study the papers on this topic
- Discuss with other developers
- Some code clean up in the current SSI routine
- Write a test program to test SSI
- June 17 - June 23 (1 week)
- Lower dimension intersections
- P/P, P/C, P/S
- With the support of openNURBS
- Tests and documentations
- Lower dimension intersections
- June 24 - July 7 (2 weeks)
- Intersections regarding curves
- C/C, C/S
- Subdivision - curve trees, surface trees
- Tests and documentations
- Intersections regarding curves
- July 7 - Aug. 4 (4 weeks)
- TDD on SSI
- Test the SSI
- Find the problems
- Fix the bugs
- Find more bugs and fix them
- Degenerated cases
- Try to get the code faster
- Fit the curve to a lower order if possible
- Documentations
- Comment in code
- Write some extra document on SSI (algorithms, problems, TODOs...)
- Mid-term evaluation in July 29 - Aug. 2
- TDD on SSI
- Aug. 5 - Aug. 18 (2 weeks)
- Finish the surface partitioning
- Polygon partitioning
- Curve-curve intersection
- Tests
- Trims may intersect
- Finish the surface partitioning
- Aug. 19 - Aug. 25 (1 week)
- Add connectivity graph support
- Generate connectivity graphs for objects
- Design proper data structures for the graph
- Add connectivity graph support
- Aug. 26 - Sept. 1 (1 week)
- Inside-outside tests
- Curve-surface intersection
- BFS of the graph to determine inside/outside
- Inside-outside tests
- Sept. 2 - Sept. 8 (1 week)
- Generate valid ON_Brep objects
- Read code in IsValid() functions
- Add elements (trim, edge, etc.)
- Try to pass the validation
- Extend the brep command in MGED
- Generate valid ON_Brep objects
- Sept. 9 - Sept. 15
- Robustness Issues
- Deal with the degenerated cases
- All 3 steps should be modified
- Tests
- Fix bugs
- Improve performance
- Robustness Issues
- Sept. 16 - Sept. 22 (1 week)
- Pencils down
- Code clean up
- Documentation (wiki pages)
- Pencils down
- Sept. 23 - Sept. 27 (1 week)
- Final evaluation
- Submit code to Google