This document provides a technical overview of BRL-CAD's Non-Uniform Rational Basis Spline (NURBS) Boolean evaluation implementation. It includes details on user command line functionality, an overview of the algorithms and source code implementation, details on developer debugging facilities, and an overview of the debugging process (with a real example). This is intended to be a practical resource for software developers wanting improve BRL-CAD's NURBS Boolean evaluation implementation.
It is assumed that the reader has rudimentary familiarity with C/C++ software development and the BRL-CAD software package. This includes how to acquire, modify, and rebuild the BRL-CAD source code, and how to run and debug C/C++ applications. It is also assumed that the reader has a some understanding of concepts from 3D geometry such as surface normal vectors, parametric functions, boundary representation (B-Rep) geometry, and trimmed NURBS.
Section 2 of this document briefly describes NURBS Boolean evaluation in BRL-CAD from a user perspective.
Section 3 outlines the major algorithms being used and the files and functions in the BRL-CAD source code that implement them. It also explains important concepts helpful in understanding and modifying the source code.
Section 4 covers the current process for debugging evaluation issues. It describes available debugging tools, and provides step-by-step instructions for tracking down bugs based on debug information, including a complete example of debugging a real evaluation issue.
It should be noted that some of the information in this document may become outdated due to future changes to the BRL-CAD software suite. Any developer making significant changes to the implementation should update the copy of this document that is included with the BRL-CAD source code.
The brep command is available in BRL-CAD's MGED and Archer applications. If the command is run with a single argument naming a combination, the components of the combination are converted into NURBS objects which are combined into a single evaluated NURBS object according to the Boolean operations in the combination.
By default, the evaluated B-Rep-type object is written to the
database with its original name plus the suffix
.brep (e.g. running the
brep command on obj
produces obj.brep). If a specific name is
desired for the output object, it can be provided as the second
argument to the brep command.
There are a number of known limitations to the NURBS Boolean evaluator as currently implemented:
May produce incorrect output due to unhandled intersection cases.
Unoptimized performance resulting in potentially significant runtimes.
Material properties of source objects are discarded.
Some primitive conversions to NURBS are undefined (e.g., an infinite halfspace).
Hollow objects are not built topologically continuous.
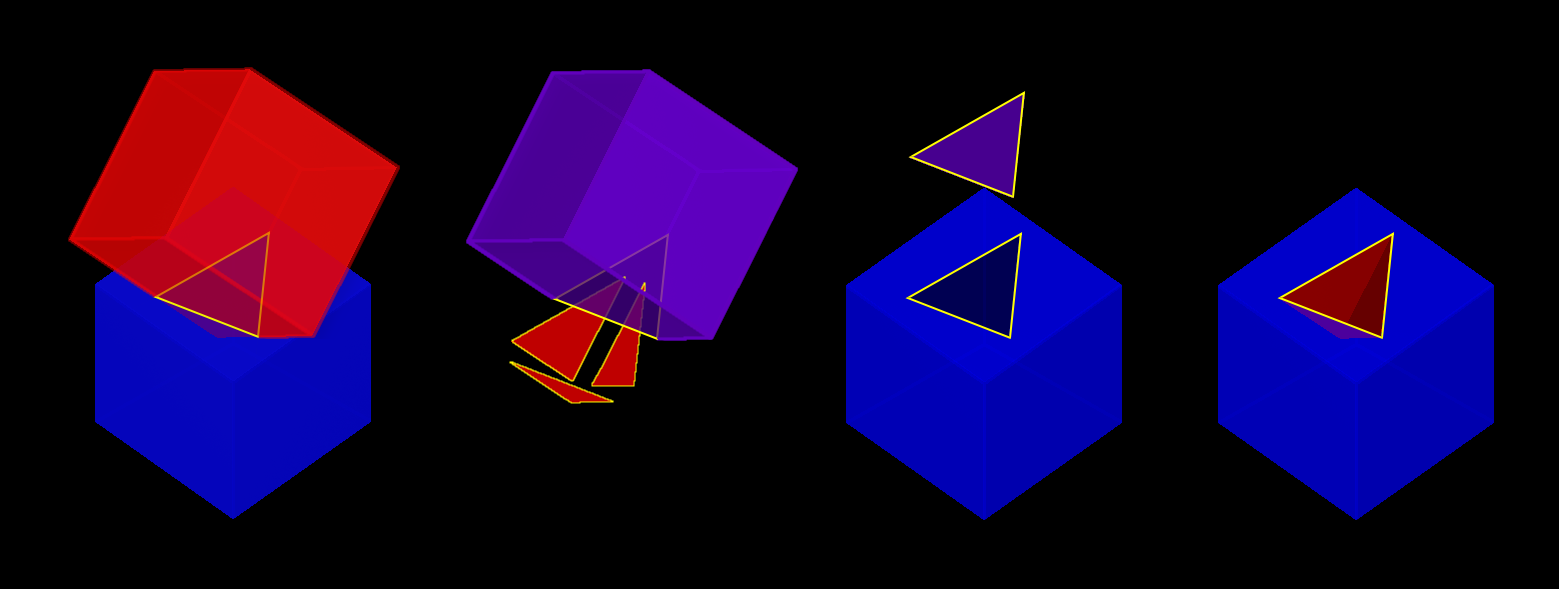
One cube (red) is subtracted from another (blue). Leftmost image: the two cubes are first converted to B-Rep objects and intersected. Middle images: the individual faces involved in the intersection are split by the intersection curves and categorized as belonging (red, blue) or not belonging (purple) in the final evaluated object. Rightmost image: the final object is stitched together from the retained trimmed faces.
Figure 1. Evaluation of a Subtraction
The technical approach used for evaluating Boolean operations on NURBS entities involves calculating geometric intersections, trimming surfaces accordingly, and stitching together a resulting object. Boundary representation NURBS objects are composed of faces, edges, and vertices; and these topologically describe how surfaces, curves, and points are joined together to represent geometry. The geometry is used to find intersections. The topology is used in the application of Boolean logic. This is oversimplified as there are also trimming curves, loops, orientations, and other details involved, but this is nonetheless a useful foundation for understanding the basic approach employed.
BRL-CAD heavily integrates and extends the OpenNURBS Toolkit by Robert McNeel & Associates, developers of the proprietary Rhinoceros freeform NURBS modeling software. BRL-CAD heavily uses OpenNURBS for trimmed NURBS geometry representation (both in-memory and on-disk) and implements functionality not included with OpenNURBS such as ray tracing and Boolean evaluation. [1] Additional functionality implemented for BRL-CAD is primarily contained within the boundary representation and ray trace libraries (LIBBREP and LIBRT). [2]
The overall NURBS Boolean evaluation algorithm is based on
the paper BOOLE: A System to Compute Boolean
Combinations of Sculptured Solids. (S. Krishnan
et al., 1995). The main implementation file for the Boolean
evaluation algorithm is
boolean.cpp.
The NURBS surface-surface intersection algorithm is based on
the "NURBS Intersection Curve Evaluation" section of the
paper Performing Efficient NURBS Modeling
Operations on the GPU (A. Krishnamurthy et al.,
2008). A detailed outline of the algorithm, as implemented,
appears in the main implementation file for the NURBS
Surface-Surface intersection algorithm,
intersect.cpp.
Evaluating a Boolean
This is a high-level overview of the Boolean evaluation performed on two B-Rep objects.
Make sure you have two entities that are geometric, solid, and valid; that they are topologically connected, describe manifold surfaces, and enclose some non-infinite volume.
Make sure you have a valid Boolean operation (i.e., UNION, SUBTRACT, INTERSECT).
Make sure their bounding boxes overlap, otherwise evaluation is trivial.
Procedure 1. Evaluate Intersections
Determine face intersections between the two input objects
For each face:
Calculate surface intersection with all other surfaces to get intersection curves
For all surfaces whose bounding poxes intersect, calculate surface-surface intersections (SSI)
Identify any coincident overlap surfaces
Identify coincident overlap boundary curves
If stitched boundary curves form a closed loop, record an overlap intersection event
Identify any other intersection curves and points
Split original surfaces into pieces
For each intersection curve and overlap intersection event:
Divide original surface into separate surfaces according to the Boolean operation
For each new surface, create new trimmed NURBS face
Join trimmed NURBS faces based on intersections and the Boolean operation
Combine resulting faces into a new evaluated B-Rep object
The ON_Boolean() function performs a
single Boolean evaluation on two B-Rep objects. A single
execution of the brep command in MGED
or Archer may involve passing several successive pairs of
B-Rep objects to this function.
int
ON_Boolean(
ON_Brep *evaluated_brep,
const ON_Brep *brep1,
const ON_Brep *brep2,
op_type operation);
In the nontrivial case where the bounding boxes of
brep1 and
brep2 intersect,
get_evaluated_faces() is called to get
the trimmed NURBS faces of the evaluated Boolean result. The
faces are then combined into a single B-Rep object returned
via the evaluated_brep argument.
ON_ClassArray< ON_SimpleArray<Trimmed Face *> >
get_evaluated_faces(
const ON_Brep *brep1,
const ON_Brep *brep2,
op_type operation);
The intersection curves between the faces of
brep1 and
brep2 are found by
get_face_intersection_curves(). These
curves are used to split the original surfaces into pieces,
each becoming a new trimmed NURBS face. The
categorize_trimmed_faces() function is
used to identify which pieces, based on the Boolean
operation, are part of the evaluated result. Each
TrimmedFace whose
m_belong_to_final member is marked
TrimmedFace::BELONG is used by
ON_Boolean() to create the final
evaluated result.
ON_ClassArray< ON_SimpleArray<SSICurve> >
get_face_intersection_curves(
ON_SimpleArray<Subsurface *> &surf_tree1,
ON_SimpleArray<Subsurface *> &surf_tree2,
const ON_Brep *brep1,
const ON_Brep *brep2,
op_type operation);
Each pair of brep1 and
brep2 surfaces whose bounding boxes
intersect are passed to the
ON_Intersect() surface-surface
intersection routine. The
get_subcurves_inside_faces() routine is
used to remove irrelevant parts of the surface-surface
intersection curves based on the trimming curves of the
associated faces.
int
ON_Intersect(const ON_Surface *surfA,
const ON_Surface *surfB,
ON_ClassArray<ON_SSX_EVENT> &x,
double isect_tol,
double overlap_tol,
double fitting_tol,
const ON_Interval *surfaceA_udomain,
const ON_Interval *surfaceA_vdomain,
const ON_Interval *surfaceB_udomain,
const ON_Interval *surfaceB_vdomain,
Subsurface *treeA,
Subsurface *treeB);
The first stage of the surface-surface intersection algorithm attempts to identify overlap intersections (areas where the two surfaces are coincident). Our assumption is that the boundary curve of any overlap region must be formed from isocurves of the overlapping surfaces.
Subcurves of isocurves that intersect both surfaces, such
that the surfaces are coincident on one side of the curve
but not the other, potentially form part of overlap
boundaries. These curves are identified using
find_overlap_boundary_curves(). To
avoid wasted computations, this function also returns
intersection points and non-boundary intersection curves
which were found during the search for boundary curves.
Then, the
split_overlaps_at_intersections()
function is run, and curve pieces that share endpoints are
stitched together. The stitched boundary curves which
close to form loops are recorded as overlap intersection
events.
The second stage of the surface-surface intersection
algorithm attempts to identify other intersection curves and
points. The input surfaces surfA and
surfB are subdivided into four
subsurfaces, whose bounding boxes are tested in pairs to see
which subsurfaces potentially intersect. This subdivision
repeats to a fixed depth determined by the constant
MAX_SSI_DEPTH (defined in
brep_defines.h).
Subsurfaces that lie completely inside an overlap region
identified in the first stage are discarded. Each remaining
pair of subsurfaces with intersecting bounding boxes is
tested for intersection. This is accomplished by
approximating each subsurface with two triangles (i.e. a
'split' quad whose corners coincide with those of the actual
subsurface patch, which has been split diagonally for a more
accurate fit). The triangles are then intersected, and the
average of all intersection points is used as the initial
guess for a Newton iterative solver, implemented by
newton_ssi(), which searches for a point
close to the initial guess point which lies on both
surfaces.
Solved points that reside inside an overlap region
identified in the first stage are discarded. Of the
remaining solved intersection points between
surfA and
surfB, those which are near one
another are stitched together into polyline curves. If a
line or conic curve can be fit to the polyline curves in 2D,
the fit curve replaces the original
surfA and/or
surfB polyline curve.
BRL-CAD leverages the OpenNURBS library primarily for its classes that represent general (i.e. NURBS) B-Rep surface, curve, and point geometry. The following sections describe the OpenNURBS library symbols most commonly used in the NURBS Boolean evaluation implementation, with relevant usage notes.
Warning
When using an OpenNURBS utility that hasn't been used elsewhere in the implementation, always check the documentation and the implementation to make sure it does what you expect.
Misleading methods have been misused in the past. For
example, bool ON_Line::InPlane(ON_Plane&
plane) appears to test if a line lies in the
given plane, but actually constructs a plane that contains
the line.
Another example is double
ON_Line::MinimumDistanceTo(const
ON_Line&). While the function does indeed
return the distance of the shortest path between one line
and another, reading the implementation reveals an
undocumented assumption that the
ON_Line provided as an argument is
not on the same infinite line as the instance the method is
invoked on. That is, the ON_Lines can
be parallel, but not coincident.
OpenNURBS includes two general array classes,
ON_ClassArray and
ON_SimpleArray, which are similar to
C++'s std::vector. Besides having
slightly friendlier interfaces, they also feature some
higher-level member functions like
Reverse() and
Quicksort().
The primary difference between the two classes is that
ON_SimpleArray doesn't bother
constructing and destructing its items. This makes it more
efficient than ON_ClassArray, but
unsuitable for class objects (though pointers to objects are
fine). ON_ClassArray requires items
to have correctly implemented copy and assignment functions.
The NURBS Boolean evaluation implementation generally
employs a combined array of known size to index elements
from two input objects. For example, if
brepA has
i
faces and brepB has
j
faces, a single array of i +
j elements is created.
Warning
The OpenNURBS array classes do not check for out-of-bounds
indexing. This isn't a problem in the simple case where
items are added with Append() and
elements [0, Count()
- 1] are iterated over.
However, if the array will be a fixed size whose items are
assigned in a non-sequential order, both
the capacity
and count should be set, or else the
reported Count() will be incorrect, and
copying arrays by assignment won't work.
ON_ClassArray< ON_SimpleArray<SSICurve> > curves_array(face_count1 + face_count2); curves_array.SetCount(curves_array.Capacity());
Curves and surfaces are nearly always allocated on the heap and referenced by pointers, both in the OpenNURBS library, and in the NURBS Boolean evaluation implementation.
Mostly these allocations are simply done with
the new keyword as with any other
class. However, a few classes,
notably ON_Brep have
a New() function that wraps the
allocation, which is preferred over using new
directly for technical reasons specified in the
OpenNURBS opennurbs_brep.h header.
Pointers to objects, curves in particular, are generally "stolen" to avoid having to create a new copy of the object.
Warning
Classes containing heap-allocated objects delete them in their destructors. Proper stealing of pointers requires the instance's members be set to NULL.
ON_SimpleArray<ON_SSX_EVENT> x;
...
for (int i = 0; i < csx_events.Count(); ++i) {
// copy event
x.Append(csx_events[i]);
// clear pointers from original so they aren't deleted by the
// ON_SSX_EVENT destructor
csx_events[i].m_curveA = NULL;
csx_events[i].m_curveB = NULL;
csx_events[i].m_curve3d = NULL;
}
The OpenNURBS routines make extensive use of the
symbol ON_ZERO_TOLERANCE in calculations
to test if a result is to be considered equal to zero, or if
two values are to be considered equal.
Note
The NURBS Boolean evaluation implementation generally uses
the function ON_NearZero(double x, double
tolerance = ON_ZERO_TOLERANCE) to check if
values are near zero, or to check if two values are
identical (e.g ON_NearZero(t -
last_t)).
This function is also used to determine if objects are
close enough to be considered
intersecting: ON_NearZero(pt.DistanceTo(other.pt),
INTERSECTION_TOL).
The ON_2dPoint and
ON_3dPoint classes intuitively
implement operators such as + and
* to allow points to be easily summed and
scaled.
The operator[] functions are notable
because coordinates are not actually stored as arrays in
these classes, but rather in the named
members x, y,
and z. So while accessing coordinates
as pt[0], pt[1] is
possible, the more
readable pt.x, pt.y,
is more typically utilized.
The most frequently used member function
is DistanceTo(const ON_3dPoint &p),
used to check inter-point distances, either as part of an
intersection test or to identify closeable gaps or duplicate
points.
Note
ON_2dPoint objects can be, and are,
safely passed to functions that
take ON_3dPoint
arguments. The ON_3dPoint arguments
are constructed from the
provided ON_2dPoint objects, with
their z coordinates set to 0.
The NURBS Boolean evaluation implementation generally
constructs 2D curves by populating
an ON_3dPointArray with 2D points,
rather than using
an ON_2dPointArray, as the 3D
version of the class (besides having additional useful
member functions), can be used to initialize
an ON_PolylineCurve.
ON_BoundingBox is returned by
the BoundingBox(), GetTightBoundingBox(),
and GetBBox() functions, which are
implemented by all geometry classes inheriting
from ON_Geometry.
The most commonly used members
of ON_BoundingBox
are Diagonal() (usually in an expression
such as bbox.Diagonal().Length() used as
a scalar size estimate), and IsPointIn()
and MinimumDistanceTo() (used in
intersection tests).
ON_Interval is used to represent the
domains of parametric curves and surfaces. The
domain starts
at m_t[0] and ends
at m_t[1]. These members can be set
directly or via Set(double t0, double
t1).
Warning
The start, end, and overall length of the domain
are arbitrary,
and m_t[0] need not be less
than m_t[1]. If the numerically smaller
or larger domain endpoint is needed, these should be
accessed via the Min()
and Max() member functions.
The ParameterAt(double x) function
translates a normalized parameter (from
a domain starting at 0.0 and ending at 1.0) into
a real parameter. Thus, the start of
the domain is at domain.ParameterAt(0.0),
the midpoint is
at domain.ParameterAt(.5), etc.
The most frequently used geometry class
is ON_Curve, a generic container for
parametric curves. The curve is interrogated by using
the PointAt(double t) method to
evaluate points at arbitrary values inside the curve's
domain, which is specified by
the ON_Interval returned by
the Domain() method. The start and end
points of the curve have dedicated access
methods, PointAtStart()
and PointAtEnd().
Warning
PointAt() takes a real parameter;
parameters normalized to [0,
1] must be converted. For
example, the midpoint of the curve can be found as
curve->PointAt(curve->Domain().ParameterAt(.5)). PointAt()
does not check if the
t value you give it is inside the
curve's domain, so you have to get this right!
All the PointAt() methods return
an ON_3dPoint, though in the common
case where ON_Curve objects are
representing 2D trim curves, the z coordinate will be 0.0.
It is sometimes necessary to reverse a curve's domain. This
is done using the Reverse() method to
facilitate stitching curves together. The function has a
Boolean int return value that must be
checked.
if (curveA->PointAtStart().DistanceTo(curveB->PointAtStart()) < dist_tol) {
if (curveA->Reverse()) {
curveA = link_curves(curveA, curveB);
}
/* curves that cannot be reversed are degenerate and discarded */
}
Warning
Comparing curve endpoints, or even just bounding boxes
(retrieved via the BoundingBox()
method), is often sufficient in the context of different
intersection and stitching procedures. However, it's
important to keep in mind that in the general case, the
shape of the curve between its endpoints or within its
bounding box could be anything. For example, two curves
with identical start and end points could both be linear,
creating a degenerate loop. A curve whose endpoints are
equal within the OpenNURBS
ON_ZERO_TOLERANCE (testable using the
IsClosed() method), may be
self-intersecting, or degenerate to a point.
A copy of a curve is easily made using the
Duplicate() member function, which
simply wraps a standard copy procedure:
ON_Curve* Duplicate()
{
ON_Curve *p = new ON_Curve;
if (p) *p = *this;
return p;
}
This function is common to all OpenNURBS geometry classes,
but curves are by far the most frequently duplicated
objects. However, if curves are simply being retained from a
working set of container objects, the curve pointers are
generally "stolen" rather than copied, with curve members
set to NULL so that the curves aren't
destructed with the containers.
ON_Line is used to represent an
infinite line, defined by two
points, from and to.
ON_Line is not a subclass
of ON_Curve and should not be
confused with ON_LineCurve (which has
an ON_Line member), though it does
have some of the same methods as
an ON_Curve class,
including PointAt(double t). However,
because the line has an infinite domain, it can be evaluated
at any t value, though evaluating at 0.0
returns from and evaluating at 1.0
returns to, as if the line was a
parametric curve with a domain between 0.0 and 1.0.
ON_Line has helpful line-specific
methods such as ClosestPointTo(const ON_3dPoint
&point). Again, because the line is treated
as infinite, this function doesn't necessarily return a
point in the segment between from
and to.
An ON_Surface has a similar interface
to an ON_Curve, but adapted to
support the surface's two domains, u
and v (sometimes
called s
and t). These also correspond to as
the 0 and 1 surface domains (as in the first example in
following) or with an x
and y parameterization (as shown in
the second example).
Example 1. Projecting an arbitrary (u, v) point into 3D.
ON_Interval udom = surface->Domain(0); ON_Interval vdom = surface->Domain(1); ON_3dPoint surf_midpt_3d = surface->PointAt(udom.ParameterAt(.5), vdom.ParameterAt(.5));
Example 2. Projecting a trim-curve point into 3D.
ON_Interval tdom = trim_curve->Domain(); ON_3dPoint trim_midpt_uv = trim_curve->PointAt(tdom.ParameterAt(.5)); ON_3dPoint trim_midpt_3d = surface->PointAt(trim_midpt_uv.x, trim_midpt_uv.y);
ON_Brep is the top-level OpenNURBS
class used to represent the two input objects and the
evaluated result of the ON_Boolean()
function. The geometry is encoded as a collection of faces,
which for our purposes should be topologically connected to
enclose solid volumes.
An object's faces are ON_BrepFace
objects stored in the ON_Brep face
array, m_F[].
Each ON_BrepFace is defined as the
subset of an ON_Surface lying inside
the face's outerloop
(a.k.a. the face boundary) and
outside all of its innerloops
(a.k.a. trim loops or
just trims).
The loops of an ON_BrepFace are
listed in its loop array m_li[] as indexes
into the associated ON_Brep
object's ON_BrepLoop
array, m_L[]. The first (and possibly only)
loop listed in the face's loop index array is the outerloop,
and all following loops are inner trim loops. The type of
the loop is also recorded in the
loop's m_type member.
brep->m_L[brep->m_F[0]->m_li[0]].m_type; // ON_BrepLoop::outer brep->m_L[brep->m_F[0]->m_li[1]].m_type; // ON_BrepLoop::inner ... brep->m_L[*brep->m_F[0]->m_li.Last()].m_type; // ON_BrepLoop::inner
There are two OpenNURBS classes for representing
intersections. ON_X_EVENT is used for
curve-curve and curve-surface
intersections. ON_SSX_EVENT is used
for surface-surface intersections.
Note
An additional class, ON_PX_EVENT
has been implemented as an extension to the OpenNURBS API
to represent point-point, point-curve, and point-surface
intersection events.
The intersection classes enumerate a number of intersection
types. Over the course of an evaluation, the
m_type of intersection events is
repeatedly checked to determine how each event should be
processed.
When two curves are coincident with one another over a
portion of their domains, m_type will be
ON_X_EVENT::ccx_overlap.
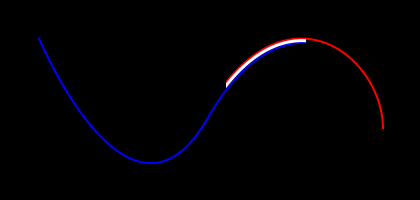
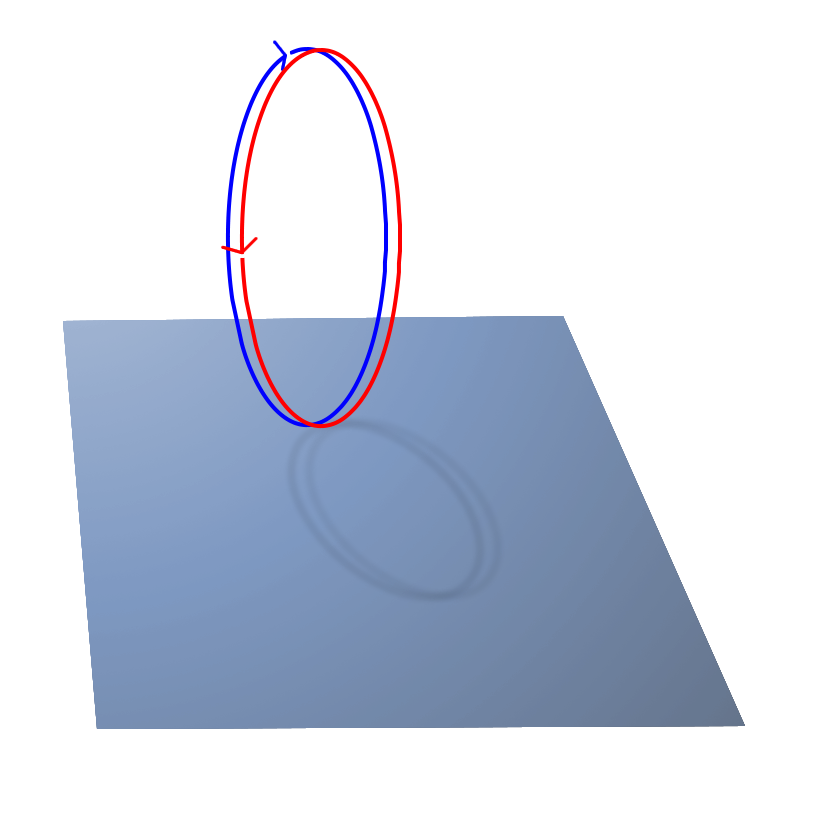
Two curves (blue on the left and red on the right) overlap over a portion of their domains (white).
Figure 2. Curve-Curve Overlap Intersection
When two surfaces are coincident over a portion of their
domains, m_type will be
ON_SSX_EVENT::ssx_overlap.

Two surfaces (blue on the left and red on the right) overlap over a region of their domains (green).
Figure 3. Surface-Surface Overlap Intersection
There are two ways that two surfaces can intersect in a
curve. If the normals of the surfaces are parallel over all
points of the curve, the intersection
m_type is
ON_SSX_EVENT::ssx_tangent, and
ON_SSX_EVENT::ssx_transverse otherwise.
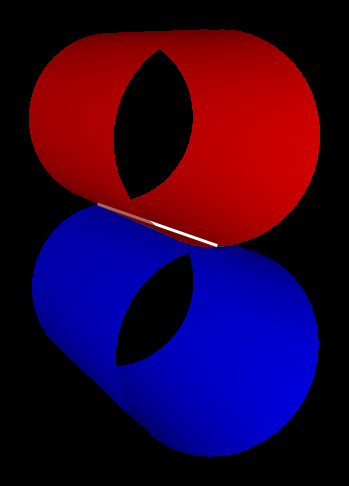
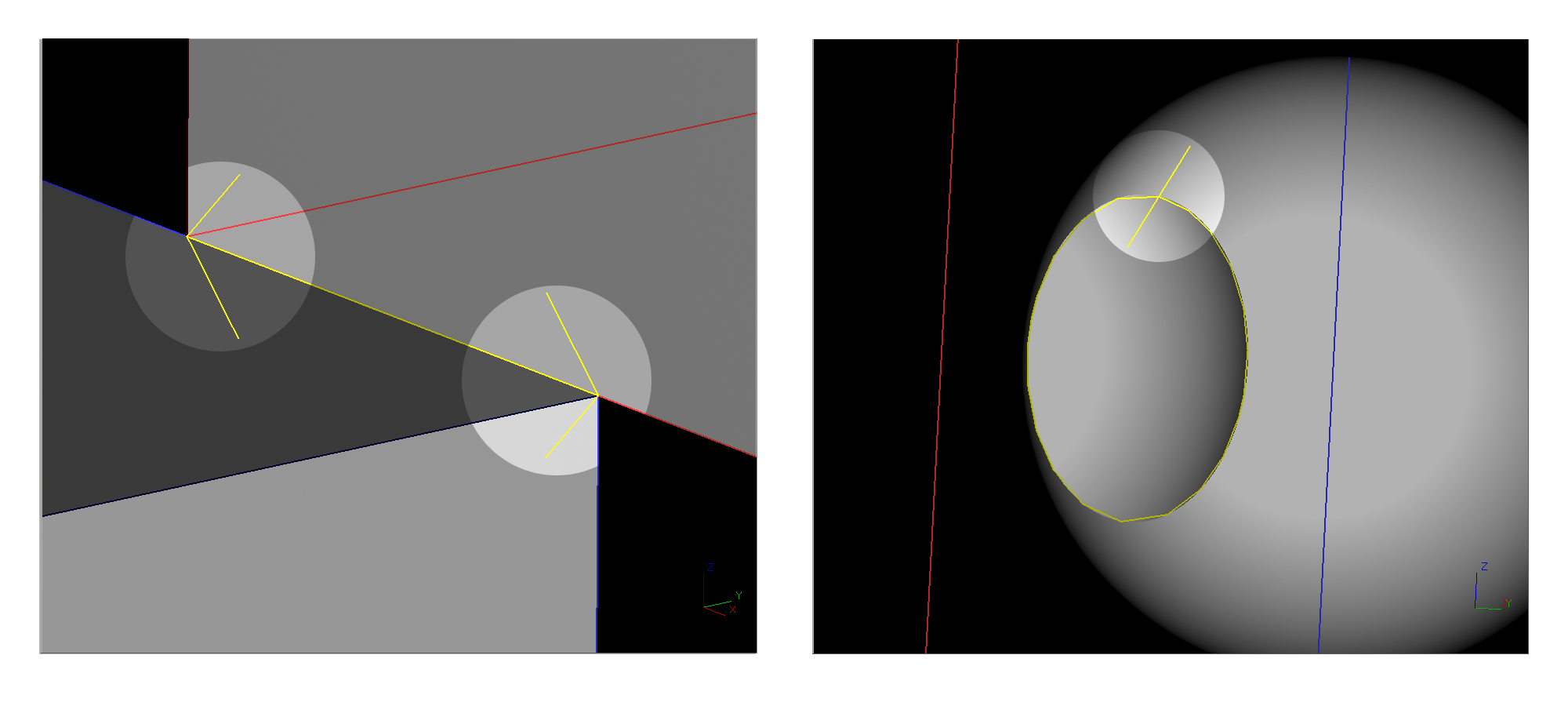
Two surfaces (red and blue) intersect in a curve (white). The normals of both surfaces are parallel to each other everywhere along the curve.
Figure 4. Surface-Surface Tangent Intersection
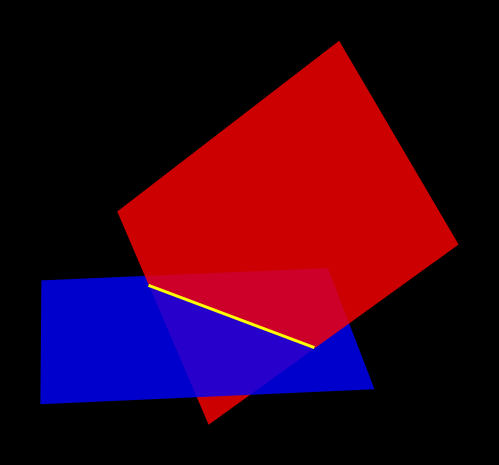
Two surfaces (red and blue) intersect in a curve (yellow). The normals of both surfaces are not parallel to each other along the curve.
Figure 5. Surface-Surface Transverse Intersection
Similarly, if two surfaces intersect at a point, the
intersection m_type is
ON_SSX_EVENT::ssx_tangent_point if the
normals of the two surfaces are parallel at that point, and
ON_SSX_EVENT::ssx_transverse_point
otherwise.
The m_type of an intersection event
determines how values in the m_a[],
m_b[], m_A[],
and m_B[] array members of the event
instance are to be interpreted (documented in the
OpenNURBS opennurbs_x.h header).
Warning
It's very easy to confuse the m_a[],
m_b[], m_A[], and
m_B[] arrays, as well as
m_a[0] vs. m_a[1],
etc. This is especially true when copying and pasting
code.
For an ON_X_EVENT representing a
curve-curve intersection whose m_type is
ON_X_EVENT::ccx_overlap,
(m_a[0], m_a[1])
represents the portion of the first curve's domain that
overlaps with the second curve, whereas in other cases
m_a[1] is simply a duplicate of
m_a[0].
As a result, a pattern seen repeatedly in the NURBS Boolean evaluation implementation is a loop over intersection events that gathers intersection points for processing, including overlap endpoints if the event represents an overlap.
for (int i = 0; i < x_event.Count(); ++i) {
x_points.Append(x_event[i].m_a[0]);
if (x_event[i].m_type == ON_X_EVENT::ccx_overlap) {
x_points.Append(x_event[i].m_a[1]);
}
}
Implicit in working with parametric geometry is that some operations are done in 2D while others are done in 3D and it's very important to know the dimension currently being worked in at all times.
As mentioned in the section above on 2D and 3D points, 3D classes are often used in the implementation to store 2D points, and thus are not a reliable indication that an operation is happening in 3D.
Being that operations in 2D tend to be a lot simpler, 2D is normally the dimension being worked in. However, because parametric curves and surfaces of different objects have different parameterizations, determining where two objects intersect can't be done by comparing 2D parameters; it must happen in 3D.
Generally, when 2D and 3D operations are taking place near one another, you'll see a naming convention being used to disambiguate 2D and 3D data. 3D identifiers are unadorned, while 2D names will be suffixed with 1/2 or A/B.
Suppose for example we have three arrays of corresponding
points that are samples along an intersection curve
between two surfaces. The 3D array might simply be
named points. The corresponding 2D
points in the domains of the two surfaces involved are
then very likely to be named points1
and points2
or pointsA
and pointsB. Whether the 1/2 or A/B
suffixes are used typically depends on whether the input
surfaces have names
like surf1/surf2
or surfA/surfB. The
latter is more likely to be used when processing
intersection events, as members of the OpenNURBS
intersection event classes are
named m_a
and m_b, etc.
The ON_Intersect() intersection
routines (intersect.cpp) generally
take an isect_tol argument, which is a
3D tolerance normally equal to the constant
ON_INTERSECTION_TOL. 2D tolerances,
following the convention described above, are generally
named isect_tolA and
isect_tolB.
2D tolerance values for curves and surfaces are derived
from the 3D tolerance value using
the tolerance_2d_from_3d()
routines. The length of the diagonal of the 3D bounding
box of the curve or surface is divided by the length of
the 2D domain to get a rough estimate of what distance in
the 2D domain corresponds to the 3D tolerance distance. In
other words, the hope is that two points on
a curveA or surfA
that are isect_tolA units apart in 2D,
will evaluate to two 3D points that
are isect_tol units apart in 3D.
Warning
The difference between isect_tol
and isect_tolA
and isect_tolB can be arbitrarily
large, so it's import that the correct tolerance is used
in all cases. However, it's sometimes tempting to use
the wrong tolerance, for instance using the
2D isect_tolA in a 3D intersection
test simply because the 3D points were evaluated from 2D
points in the surfA domain.
It's important to remember that because parameterizations
are arbitrary, there is no correspondence whatsoever
between a 2D curve in one surface's domain and another
surface's domain, even when those 2D curves evaluate to
the same 3D curve. In particular, you cannot assume that
traversing different curves along their domain from
m_t[0] to m_t[1]
translates to a consistent traversal direction in 3D, or
even that each 2D curve's
m_t[0]/m_t[1]
corresponds to the same 3D starting point on a closed
curve.
The projections (red and blue) of two 2D curves in different domains represent the same 3D curve (within tolerance). However, the start and end points as well as the 3D traversal directions differ between the projections.
Figure 6. Different Traversals of the Same Curve
By the nature of the math involved in representing parametric geometry (e.g. converting between 2D and 3D, and solving intersections between objects with different parameterizations) values that are expected to be identical are generally only equal within a certain tolerance, or error.
Over the course of the evaluation, the same data is interrogated and processed a number of times. If ignored, the error introduced in one stage of the evaluation can grow over subsequent stages, causing an incorrect determination that leaves a curve unclosed, a surface unsplit, and ultimately an incorrect evaluated result.
As a consequence, it's generally a good idea to remove fuzziness when you find it, and avoid algorithms that introduce more error.
Start and end points of closed curves are rarely identical. So if a curve is found to be closed within tolerance, it's a good idea to actually set the end point equal to the start point. Similarly, if an interval of a domain is calculated whose endpoints are within tolerance of the domain endpoints, the entire domain should be used.
Note
Producing subcurves of existing curves is a common operation in the NURBS Boolean evaluation implementation. This is a prime example of an operation that can introduce fuzziness into the evaluation. For example, we may be splitting a curve to remove a portion of it, and end up with two new curves with endpoints that used to align when part of the original curve, but no longer do.
The Split() method
of ON_Curve can be used to
produce subcurves, but in the implementation it's much
preferred to use the sub_curve()
function defined in intersect.cpp
which wraps Split() and correctly
handles clamping of curve parameters to domain
endpoints.
The iterative method used to solve points on parametric curves and surfaces is expected to produce better answers given better inputs and more iterations. However, our algorithms can't always produce sufficient inputs, and the value the solver converges on isn't always the correct one.
This fuzziness produced in the solver's results can be mitigated in the context of finding intersection curves for example, because we solve many points and fit a curve between them. So, one unsolved point on the curve isn't going to cause an evaluation failure.
Warning
It's tempting to test curve characteristics or make
inside/outside determinations, etc. by using
the ON_Intersect()
functions. However, there's a persistent risk that the
error in the iteratively solved results will cause
incorrect determinations that cascade into larger
problems over the course of the evaluation. For this
reason, the ON_Intersect() functions
should be avoided whenever possible.
The current ongoing development activity for NURBS Boolean evaluation is debugging specific evaluation cases in order to find bugs and unhandled geometry cases in the implementation to support the evaluation of more geometry.
There are two Archer commands that can be used to plot individual components of brep NURBS objects to facilitate debugging.
These commands work by creating temporary wireframe objects
that are drawn in the view window. While drawn, these objects
appear in the in-memory database, so the
ls command will show these objects (with
names like _BC_S_<obj>_646464>
or bool1_brep1_surface03838ff), but they are
not saved with the database, and are deleted when erased from
the display.
Note
Debug wireframe objects are not drawn the same way as geometry, and do not trigger an automatic resize and refresh of the view. This means that after running a plot command, you may have to trigger a refresh manually (e.g. by running the autoview command or interactively rotating/resizing the view.
Also be aware that debug wireframes are drawn in a variety of hard-coded colors to help distinguish different subcomponents. These colors were designed to be best visible using a view whose background color is black (this should be the default, but can be easily changed in Archer via the view window's right-click menu).
The Archer brep command (also implemented in MGED) can be used to get structural information about B-Rep objects and visualize different subcomponents.
Most importantly, brep <obj> info will report summary information, including the number of NURBS surfaces and faces and brep <obj> plot S <index> can be used to plot individual surfaces in 3D.
This is the primary way you can conceptually link a surface or face index to the 3D geometry it represents. So if you notice an error in an object while viewing it in the editor, you can use the brep command to determine the index of the surface with the error, and then inspect the in-memory object in a debugger using that index into the final surface array, tracing that surface object to where it was created, etc.
Note
For evaluations involving more than two objects, the final brep NURBS object is made by converting two leaf objects into breps, performing a Boolean evaluation on them, converting the next relevant object to brep and combining it with the first intermediate evaluation to make a second intermediate evaluation, and so on up the tree.
In order to inspect the surfaces and indices for a particular stage of the overall evaluation using the brep command, it's necessary to manually create the intermediate combination (a subtree of the one being evaluated), and use the brep command to produce the intermediate NURBS result.
The dplot command is used to visualize the results of different stages of the NURBS Boolean evaluation algorithm. This makes it easier to isolate the source of a problem in an evaluation.
Unlike the brep command, the dplot command is purely a development tool. Its implementation does not honor library boundaries and does not conform to the typical conventions for editor commands, and for this reason is only available as an Archer command in the NURBS Boolean evaluation development branch (https://sourceforge.net/p/brlcad/code/HEAD/tree/brlcad/branches/brep-debug/).
In the development branch, the NURBS Boolean evaluation
source code contains additional calls to
DebugPlot functions (implemented in
debug_plot.cpp) that create
wireframe visualizations of data produced during the
evaluations.
For development convenience, these wireframes are not saved
as database objects, but rather are written as files in the
current directory, with names of the form
bool1_*.plot3. An additional
bool1.dplot is written which describes
the .plot3 files that were written in a
format understood by the dplot command.
One set of files is written for each evaluation. Between
evaluations, a static counter increments the numeric suffix
that's used in the output filenames. So for a combination
consisting of three objects, the bool1*
files will hold results from the intermediate boolean
evaluation between the first two objects in the combination,
and the bool2* files will hold results
from the final evaluation between the intermediate evaluated
object and the remaining leaf of the original comb.
The DebugPlot functions always use
the same file names and do not check if written files
already exist. It is assumed that you will run an
evaluation, inspect the generated files using the
dplot command, and then manually remove
(or just move) the generated .dplot and
.plot3 files before performing another
evaluation with the brep command.
dplot bool1.dplot ssx lets you interactively step through the pairs of surfaces whose axis-aligned bounding boxes were found to intersect. The wireframes of the B-Rep objects being intersected are drawn with the current surface pair highlighted. The
ssx_indexassigned to the pair, which can be used as an argument to other dplot commands, is displayed in the command window.dplot bool1.dplot <ssx_index> lets you interactively step through the specific surface-surface intersections found between the pair of surfaces identified by an
ssx_index, excluding isocurve-surface intersections (shown by dplot bool1.dplot isocsx).To make it easier to check that drawn intersection curves are of the correct type and are open or closed curves as appropriate, intersections are color-coded by type (e.g. transverse intersections are drawn in yellow) and the ends of lines are decorated with arrows to indicate open ends or perpendicular segments to indicate coincident endpoints.
Endpoints of transverse surface-surface intersection curves (yellow) are decorated with arrows if open (left), and segments perpendicular to the curve if closed (right).
Figure 7. Curve Endpoint Decoration
The ssx pairs are recorded in the
find_overlap_boundary_curves() function
in intersect.cpp.
dplot bool1.dplot isocsx <ssx_index> lets you step through the isocurve-surface intersections from the pair of intersecting surfaces identified by the given
ssx_index. Wireframe plots of the two surfaces are drawn, with one surface and an intersecting isocurve of the second surface highlighted. Each combination of isocurve and surface is assigned anisocsx_index(shown in the command window) that can be used as an argument in the second form of the isocsx subcommand.dplot bool1.dplot isocsx <ssx_index> <isocsx_index> shows the actual intersection curve found between the isocurve and surface pair identified by the given
ssx_indexandisocsx_index.The plotted intersection curves are color-coded for easy type-checking, e.g. overlap intersections are drawn in green.
The isocsx curves are written in the
find_overlap_boundary_curves() function
in
intersect.cpp.
dplot bool1.dplot fcurves <ssx_index> lets you step through the surface-surface intersection curves identified by the given
ssx_indexafter they've been clipped by face trimming curves.The clipped 2D intersection curves for the first surface are drawn projected to 3D, followed by the matching curves for the second surface.
dplot bool1.dplot lcurves steps through the final 3D intersection curves used to split faces, after contiguous face-clipped pieces have been linked together.
After each curve is drawn independently, all curves are drawn at the same time.
This subcommand doesn't draw any contextual geometry; only the linked curves. Manually drawing a transparent shaded view of the original geometry usually works well for context.
An evaluated B-Rep is drawn shaded to give context to the linked intersection curves (yellow) drawn by dplot bool1.dplot lcurves.
Figure 8. Linked Curves in Context
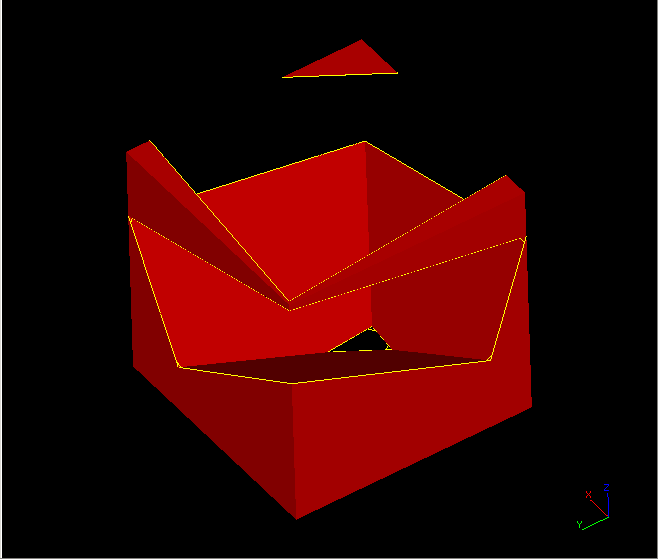
dplot bool1.dplot faces lets you step through the new set of faces formed by splitting the original faces with the final linked intersection curves. Faces that are considered part of the final result are drawn highlighted, while faces that are discarded are drawn dim.
After each face is drawn independently, all faces are drawn at the same time.
This subcommand doesn't draw any contextual geometry; only the face curves. Manually drawing a transparent shaded view of the original geometry usually works well for context.
The clipped face curves are recorded in
get_face_intersection_curves() in
boolean.cpp.
The linked curves and the categorized split faces are
recorded in get_evaluated_faces() in
boolean.cpp.
It's possible to write out custom curves from any part of the evaluation (i.e. those not covered by dplot) and view them in MGED/Archer.
You can pass a 3D ON_Curve to the
DebugPlot::Plot3DCurve() function or a 2D
ON_Curve and an associated
ON_Surface to the
DebugPlot::Plot3DCurve() function.
Both of these functions take an arbitrary filename for a
plot3 file the function will write, as well as a color for
the curve. The DebugPlot::Plot3DCurve()
has an optional vlist parameter which you
should omit (see the full definitions in
debug_plot.cpp).
Example 3. Writing a 2D Curve as a plot3 File
// somewhere in boolean.cpp
if (face1_curves.Count() > 0 && face1_curves[0] != NULL) {
static int calls = 0;
unsigned char mycolor[] = {0, 0, 62};
std::ostringstream plotname;
// generate a unique filename
plotname << "mycurve" << ++calls << ".plot3";
// plot using method of global DebugPlot instance 'dplot'
dplot->Plot3DCurveFrom2D(surf1, face1_curves[0],
plotname.str().c_str(), mycolor);
}
After running an evaluation that produces a custom plot3 file, you can draw it using the overlay editor command.
After you notice a problem in the output shown by the dplot command, you need to locate the source code that created the erroneous geometry so you can start debugging. The following sections provide example procedures you can perform in Archer and a debugger to start investigating some common issues.
If the ssx subcommand shows that a surface-surface intersection is missing...
Use the info and plot subcommands of the brep command to find the indexes (
<i>and<j>) of the two faces involved in the missing intersection.For a multi-part evaluation, you'll need to manually create the appropriate intermediate evaluation, corresponding to the
bool<n>.dplotshowing the error, to run the brep command on.Set a breakpoint at the
ON_Intersect()call inget_face_intersection_curves()with the conditioni == <i> && j == <j>.For a multi-part evaluation, you'll need to first skip to the correct invocation of
ON_Boolean(), either manually, or by conditioning a breakpoint on the value of the staticcallsvariable defined at the top of that function.Start stepping through the
ON_Intersect()call.
If the isocsx subcommand shows that an isocurve-surface intersection is missing...
Note the index
<n>of the surface-surface intersection used as the argument to the isocsx subcommand.Use the info and plot subcommands of the brep command to find the indexes (
<i>and<j>) of the two faces involved in the missing intersection.For a multi-part evaluation, you'll need to manually create the appropriate intermediate evaluation, corresponding to the
bool<n>.dplotshowing the error, to run the brep command on.Set a breakpoint at the
ON_Intersect()call inget_face_intersection_curves()with the conditiondplot->SurfacePairs() == <n - 1> && i == <i> && j == <j>.For a multi-part evaluation, you'll need to first skip to the correct invocation of
ON_Boolean(), either manually, or by conditioning a breakpoint on the value of the staticcallsvariable defined at the top of that function.When the break is reached, add a breakpoint at
find_overlap_boundary_curves()and advance to that function.Step through the intersections, printing out the isocurve endpoints and visualize them in the context of the geometry in Archer (e.g. by centering the view at those points, or creating spheres centered on them, etc.) to find the isocurves of interest:
(gdb) print surf1_isocurve->PointAtStart() (gdb) print surf1_isocurve->PointAtEnd()Investigate how the isocurves are processed.
If the isocsx subcommand shows that isocurve intersections are incorrect...
Note the index
<n>of the surface-surface intersection used as the argument to the isocsx subcommand.Set a break after the call to
find_overlap_boundary_curves()inintersect.cppwith the conditiondplot->SurfacePairs() == <n>.For a multi-part evaluation, you'll need to first skip to the correct invocation of
ON_Boolean(), either manually, or by conditioning a breakpoint on the value of the staticcallsvariable defined at the top of that function.Inspect the
overlapsarray.
If the ssx subcommand shows an incorrect intersection curve...
Note the index
<n>of the surface-surface intersection used as the argument to the ssx subcommand, and the index<k>assigned to the incorrect intersection event.Set a breakpoint at the
ON_Intersect()call inget_face_intersection_curves()with the conditiondplot->SurfacePairs() == <n - 1>.For a multi-part evaluation, you'll need to first skip to the correct invocation of
ON_Boolean(), either manually, or by conditioning a breakpoint on the value of the staticcallsvariable defined at the top of that function.Step into
ON_Intersect()and wait forx.Count() == <k - 1>.Investigate the creation of the next intersection event.
If the ssx subcommand shows the correct intersections for a given surface pair, but the fcurves subcommand shows those curves are not being correctly clipped by faces...
Note the index
<n>of the surface-surface intersection used as the argument to the ssx and fcurves subcommands, and the index<k>assigned by fcurves to the incorrect clipped curves.Set a breakpoint at the
get_subcurves_inside_faces()call insideget_face_intersection_curves()with the conditiondplot->SurfacePairs() == <n + 1> && k == <k>.For a multi-part evaluation, you'll need to first skip to the correct invocation of
ON_Boolean(), either manually, or by conditioning a breakpoint on the value of the staticcallsvariable defined at the top of that function.Start stepping through
get_face_intersection_curves()to investigate how the event intersection curves are being clipped.
If the faces subcommand shows that an input face was not split correctly, but the lcurves subcommand shows the relevant intersection was accurate...
Note the index
<n>assigned by lcurves to the relevant linked curves.Set a breakpoint at the
split_trimmed_face()call insideget_evaluated_faces()with the conditiondplot->LinkedCurves() >= <n + 1>.For a multi-part evaluation, you'll need to first skip to the correct invocation of
ON_Boolean(), either manually, or by conditioning a breakpoint on the value of the staticcallsvariable defined at the top of that function.Inside
split_trimmed_face(), check the input face loops and ssx curves:(gdb) print orig_face->m_outerloop.m_a[i]->PointAtStart() (gdb) print orig_face->m_outerloop.m_a[i]->PointAtEnd() (gdb) print orig_face->m_innerloop.m_a[i]->PointAtStart() (gdb) print orig_face->m_innerloop.m_a[i]->PointAtEnd() (gdb) print ssx_curves.m_a[i].m_ssi_curves.m_a[i].m_curve->PointAtStart() (gdb) print ssx_curves.m_a[i].m_ssi_curves.m_a[i].m_curve->PointAtEnd()
What follows is a step-by-step debugging of a real issue
affecting the X combination from the
BRL-CAD sample database axis.g.
This issue was fixed in revision 65179 in the NURBS Boolean evaluation development branch of the source repository (https://sourceforge.net/p/brlcad/code/HEAD/tree/brlcad/branches/brep-debug/).
If you want to follow along, you can reinstate the error in a checkout of the development branch:
$ svn merge -r 65179:65178 ^/brlcad/branches/brep-debug
Open
axis.gin Archer and convert the original combination to brep.Archer> opendb axis.g Archer> brep X X.brep is made.The file
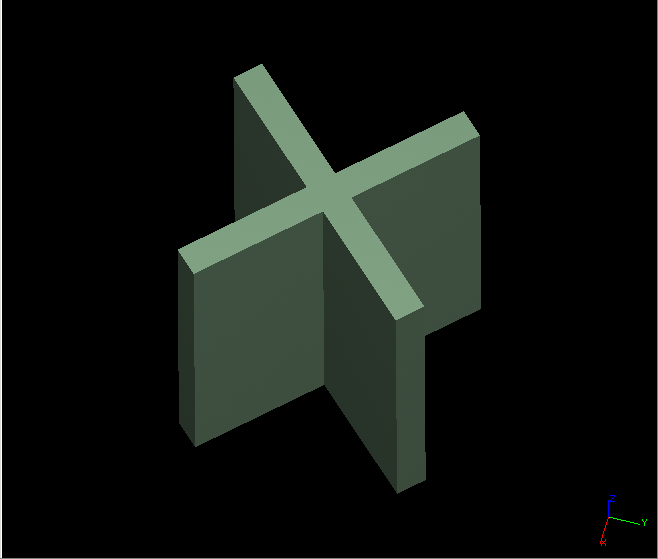
bool1.dplotis created in the current directory, as well as a few hundred.plot3files.The object
Xis the union of two intersecting arb8 boxes. The arb8s are perpendicularly intersecting plates that create a 3D shape that looks like a 2D letter "X" in the X-Y plane that has been extruded along the Z axis.The ssx subcommand of dplot is used to check that all expected surface-surface intersections were attempted between the B-Rep NURBS versions of the two arb8s, hereafter referred to as brep1 and brep2.
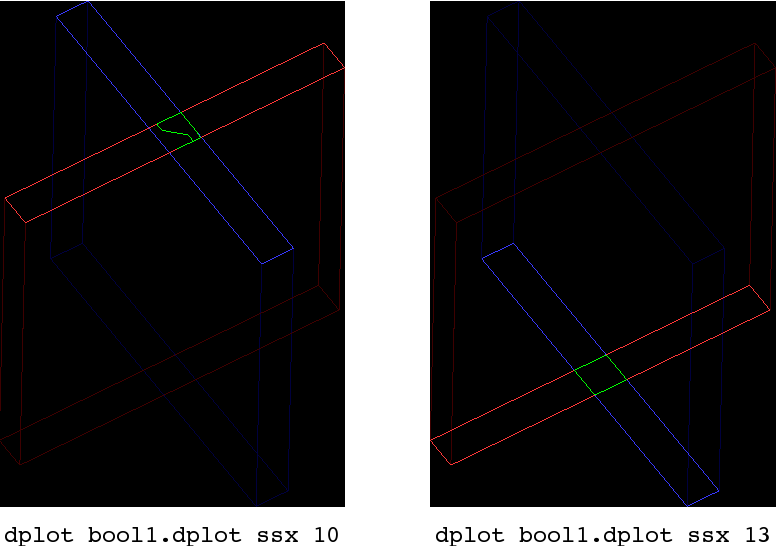
Archer> dplot bool1.dplot ssx Press [Enter] to show surface-surface intersection 0 ... Press [Enter] to show surface-surface intersection 13All 14 expected intersection events are reported. Each of the two larger-area faces of brep1 transversely intersects the two similar faces of brep2 (
ssx_index0, 1, 4, 5). Two edges of each of these faces lie in the same plane (the X-Y plane and another plane parallel to it) as two of the four smaller-area faces of the other B-Rep (ssx_index2, 3, 6, 7, 8, 9, 11, 12). These two pairs of smaller area faces also intersect each other in square overlap intersections (ssx_index10, 13).The ssx <ssx_index> subcommand of dplot is used to check the individual intersection events.
Archer> dplot bool1.dplot ssx 0 ... Archer> dplot bool1.dplot ssx 13The surface-surface intersection with
ssx_index10 appears incorrect (compare to the other overlap intersection,ssx_index13). It's been correctly identified as an overlap intersection, but it doesn't contain the full, square area of the overlap.The overlap intersection should have been created by stitching together the four isocurve-surface intersections that make each edge of the square overlap.
The isocsx <ssx_index> subcommand of the dplot command is used to check that all isocurve-surface intersections were attempted.
Archer> dplot bool1.dplot ssx 10All four expected isocurve-surface intersections are reported.
The isocsx <ssx_index> <isocsx_index> subcommand of the dplot command is used to check each isocurve-surface intersection curve.
Archer> dplot bool1.dplot isocsx 10 0 Archer> dplot bool1.dplot isocsx 10 1 Archer> dplot bool1.dplot isocsx 10 2 Archer> dplot bool1.dplot isocsx 10 3Each of the four overlap curves appears correct.
At this point, the problem doesn't seem to be with the intersection curves, but with how they were processed.
The fcurves subcommand of the dplot command is used to check the overlap intersection curve that resulted from stitching together the four (correct) isocurve-surface intersection curves. The command shows the 3D projection of the 2D curve recorded in the brep1 and brep2 domains, after they were clipped to fit inside the containing face (though clipping was unnecessary in this case, as the outer loops of the faces coincide with the boundaries of the surfaces).
Archer> dplot bool1.dplot fcurves 10The clipped curves are shown to be incorrect. This isolates the problem to a point between the time the isocurve-surface intersections were found and the time the clipped curves were created.
The isocsx plots are written by the
DebugPlot::IsoCSX()method inside thefind_overlap_boundary_curves()routine inintersect.cpp. Thefind_overlap_boundary_curves()routine is called from theON_Intersect()surface-surface intersection function, also defined inintersect.cpp. The next call afterfind_overlap_boundary_curves()returns issplit_overlaps_at_intersections().To quickly check if the splitting function introduced a problem in the overlap curves, we insert code to write out the overlap curves as
.plot3files just after thesplit_overlaps_at_intersections()call.Since the
ssx_indexvalues reported by dplot are numbered from 0, the intersection we want to investigate, whosessx_indexis 10, will be the 11th intersection recorded during the evaluation.dplot->SurfacePairs()reports the number of surface-surface intersections that have been recorded, so we write our curves on the condition thatdplot->SurfacePairs() == 10. Then we'll only get the curves from the 11th surface-surface intersection.// intersect.cpp, inside // ON_Intersect(const ON_Surface *surfA, const ON_Surface *surfB, ...) split_overlaps_at_intersections(overlaps, surfA, surfB, treeA, treeB, isect_tol, isect_tolA, isect_tolB); +if (dplot->SurfacePairs() == 10) { + for (int i = 0; i < overlaps.Count(); ++i) { + if (!overlaps[i]) { + continue; + } + unsigned char overlap_color[] = {0, 255, 0}; + std::ostringstream plotname; + + plotname << "split_overlap" << i << ".plot3"; + dplot->Plot3DCurve(overlaps[i]->m_curve3d, plotname.str().c_str(), + overlap_color); + } +} + // add csx_events for (int i = 0; i < csx_events.Count(); ++i) { x.Append(csx_events[i]);After rebuilding the code, the evaluation is run again in Archer to produce the custom plot files
split_overlap4.plot3,split_overlap5.plot3,split_overlap6.plot3, andsplit_overlap7.plot3.The overlay command is used to draw the contents of the
.plot3files.Archer> brep X Archer> overlay split_overlap4.plot3 1 ol4 Archer> overlay split_overlap5.plot3 1 ol5 Archer> overlay split_overlap6.plot3 1 ol6 Archer> overlay split_overlap7.plot3 1 ol7When the four curves are drawn, we see they are still correct after splitting, and enclose the square overlap region.
The next step in processing the overlap curves is linking contiguous curve segments together. We'll once again modify the source code, this time to write out the intermediate linked overlap curves.
Curve endpoints are tested to see if they coincide, and contiguous curves are linked with the
link_curves()routine, which returns a linked curve that replaces the original curves in theoverlaps[]array. We'll write out each such curve returned bylink_curves().// intersect.cpp, inside // ON_Intersect(const ON_Surface *surfA, const ON_Surface *surfB, ...) // after the calls to link_curves overlaps[i]->m_curveB = link_curves(overlaps[i]->m_curveB, overlaps[j]->m_curveB); } } +if (dplot->SurfacePairs() == 10) { + unsigned char linked_curve_color[] = {0, 0, 255}; + std::ostringstream plotname; + + plotname << "linked_" << i << "_" << j << ".plot3"; + dplot->Plot3DCurve(overlaps[i]->m_curve3d, plotname.str().c_str(), + linked_curve_color); +} if (!is_valid_overlap(overlaps[j])) { delete overlaps[j]; overlaps[j] = NULL;The code is re-compiled,
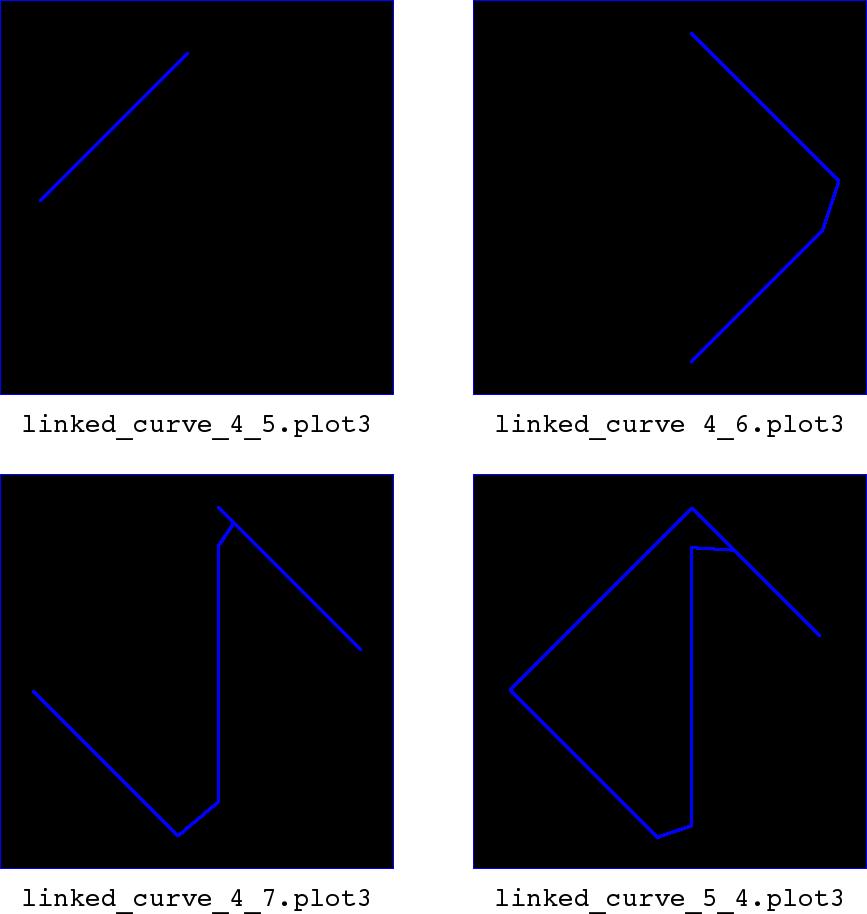
X.brepis removed from the database, and the dplot-related files are once again cleared from the working directory before re-running the evaluation.We draw our four new linked curve
.plot3files.Archer> overlay linked_4_5.plot3 1 Archer> overlay linked_4_6.plot3 1 Archer> overlay linked_4_7.plot3 1 Archer> overlay linked_5_4.plot3 1The intermediate curve represented by
linked_4_7.plot3(and the subsequentlinked_5_4.plot3) is clearly incorrect, as it cuts diagonally through the square overlap region.We'll perform the evaluation again via a debugger.
X.brepis removed from the database, and the*.dplotand*.plot3files are removed from the working directory.A breakpoint is set just before the calls to
link_curves()in theON_Intersect()surface-surface intersection function (line 3885 inintersect.cppat the time of writing), with the condition thatdplot->SurfacePairs() == 10, and that the overlap indicesiandjmatch the linked curve of interest.$ gdb mged (gdb) set args axis.g brep X (gdb) start (gdb) break intersect.cpp:3885 if dplot->SurfacePairs() == 10 && i == 4 && j == 7 (gdb) continueStepping from the breakpoint (e.g. with gdb's next command) we see that the macro test
OVERLAPS_LINKED(Start, End)evaluates as true, indicating that the start of theoverlaps[i]curves coincide with the end of theoverlaps[j]curves.Looking at the implementation of
link_curves()inintersect.cpp, we can see that the second curve argument is joined to the first curve argument using the OpenNURBSON_NurbsCurve::Append()member function. So, the start point of the second curve is joined to the end point of the first curve.HIDDEN ON_Curve * link_curves(ON_Curve *&c1, ON_Curve *&c2) { extend_curve_end_to_pt(c1, c2->PointAtEnd(), ON_ZERO_TOLERANCE); ON_NurbsCurve *nc1 = c1->NurbsCurve(); ON_NurbsCurve *nc2 = c2->NurbsCurve(); if (nc1 && nc2) { nc1->Append(*nc2); delete c1; delete c2; c1 = NULL; c2 = NULL; delete nc2; return nc1; } else if (nc1) { delete nc1; } else if (nc2) { delete nc2; } return NULL; }link_curves()is here being called withoverlaps[j]->m_curve3das its first argument andoverlaps[i]->m_curve3das its second argument. This matches our intention to link the end of theoverlaps[j]curves to the start of theoverlaps[i]curves.However, going back to the
link_curves()implementation, we also see a call toextend_curve_end_to_point()which may modify the first curve argument.This intent of this call is to ensure the end point of the first curve meets the start point of the second curve as tightly as possible (tighter than the
isect_tolvalue that was used to determine the points were coincident) before the curves are joined together.However, we see the point argument passed to
extend_curve_end_to_point()isc2->PointAtEnd(), when it should bec2->PointAtStart().This error is corrected and the code is rebuilt. The evaluation is re-run, and we use the dplot command to verify that the overlap intersection associated with
ssx_index10 is now correct.HIDDEN ON_Curve * link_curves(ON_Curve *&c1, ON_Curve *&c2) { - extend_curve_end_to_pt(c1, c2->PointAtEnd(), ON_ZERO_TOLERANCE); + extend_curve_end_to_pt(c1, c2->PointAtStart(), ON_ZERO_TOLERANCE); ON_NurbsCurve *nc1 = c1->NurbsCurve(); ON_NurbsCurve *nc2 = c2->NurbsCurve();
[1] While their license is permissive, the OpenNURBS Toolkit is only intended for and McNeel only supports it being using for reading and writing 3DM files.
[2] Unless specified
otherwise, file references are for LIBBREP source files. As
published, LIBBREP implementation files reside in
the src/libbrep/ directory with public
header files residing in the include/
directory of a BRL-CAD source hierarchy.