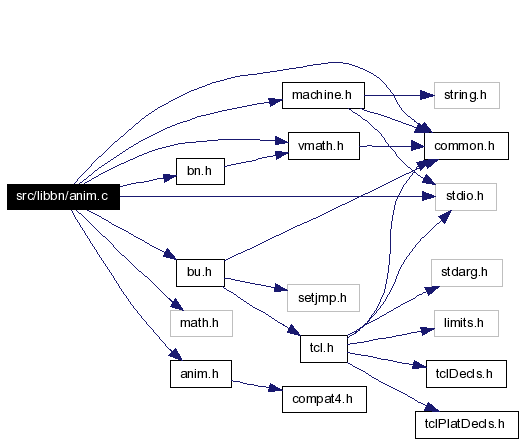
#include "common.h"
#include <stdio.h>
#include <math.h>
#include "machine.h"
#include "bu.h"
#include "vmath.h"
#include "bn.h"
#include "anim.h"
Include dependency graph for anim.c:
Go to the source code of this file.
Defines | |
| #define | M_PI 3.14159265358979323846 |
| #define | NORMAL 0 |
| #define | ERROR1 1 |
| #define | ERROR2 2 |
| #define | ASM_EMPTY 0 |
| #define | ASM_FIRST 1 |
| #define | ASM_FULL 2 |
Functions | |
| void | anim_v_permute (mat_t m) |
| Pre-multiply a rotation matrix by a matrix which maps the z-axis to the negative x-axis, the y-axis to the z-axis and the x-axis to the negative y-axis. | |
| void | anim_v_unpermute (mat_t m) |
| Undo the mapping done by anim_v_permute(). | |
| void | anim_tran (mat_t m) |
| Transpose matrix in place. | |
| int | anim_mat2zyx (const mat_t viewrot, vect_t angle) |
| Convert the rotational part of a 4x4 transformation matrix to zyx form, that is to say, rotations carried out in the order z, y, and then x. The angles are stored in radians as a vector in the order x,y,z. A return value of ERROR1 means that arbitrary assumptions were necessary. ERROR2 means that the conversion failed. | |
| int | anim_mat2ypr (mat_t viewrot, vect_t angle) |
| Convert the rotational part of a 4x4 transformation matrix to yaw-pitch-roll form, that is to say, +roll degrees about the x-axis, -pitch degrees about the y-axis, and +yaw degrees about the z-axis. The angles are stored in radians as a vector in the order y,p,r. A return of ERROR1 means that arbitrary assumptions were necessary. ERROR2 means that the conversion failed. | |
| int | anim_mat2quat (quat_t quat, const mat_t viewrot) |
| This interprets the rotational part of a 4x4 transformation matrix in terms of unit quaternions. The result is stored as a vector in the order x,y,z,w. The algorithm is from Ken Shoemake, Animating Rotation with Quaternion Curves, 1985 SIGGraph Conference Proceeding, p.245. | |
| void | anim_ypr2mat (mat_t m, const vect_t a) |
| Create a premultiplication rotation matrix to turn the front of an object (its x-axis) to the given yaw, pitch, and roll, which is stored in radians in the vector a. | |
| void | anim_ypr2vmat (mat_t m, const vect_t a) |
| Create a post-multiplication rotation matrix ,which could be used to move the virtual camera to the given yaw, pitch, and roll, which are stored in radians in the given vector a. The following are equivalent sets of commands: ypr2vmat(matrix,a); or ypr2mat(matrix,a); v_permute(matrix); transpose(matrix;. | |
| void | anim_y_p_r2mat (mat_t m, double y, double p, double r) |
| Make matrix to rotate an object to the given yaw, pitch, and roll. (Specified in radians.). | |
| void | anim_dy_p_r2mat (mat_t m, double y, double p, double r) |
| Make matrix to rotate an object to the given yaw, pitch, and roll. (Specified in degrees.). | |
| void | anim_dy_p_r2vmat (mat_t m, double yaw, double pch, double rll) |
| Make a view rotation matrix, given desired yaw, pitch and roll. (Note that the matrix is a permutation of the object rotation matrix). | |
| void | anim_x_y_z2mat (mat_t m, double x, double y, double z) |
| Make a rotation matrix corresponding to a rotation of "x" radians about the x-axis, "y" radians about the y-axis, and then "z" radians about the z-axis. | |
| void | anim_dx_y_z2mat (mat_t m, double x, double y, double z) |
| Make a rotation matrix corresponding to a rotation of "x" degrees about the x-axis, "y" degrees about the y-axis, and then "z" degrees about the z-axis. | |
| void | anim_zyx2mat (mat_t m, const vect_t a) |
| void | anim_z_y_x2mat (mat_t m, double x, double y, double z) |
| Make a rotation matrix corresponding to a rotation of "z" radians about the z-axis, "y" radians about the y-axis, and then "x" radians about the x-axis. | |
| void | anim_dz_y_x2mat (mat_t m, double x, double y, double z) |
| Make a rotation matrix corresponding to a rotation of "z" degrees about the z-axis, "y" degrees about the y-axis, and then "x" degrees about the x-axis. | |
| void | anim_quat2mat (mat_t m, const quat_t qq) |
| void | anim_dir2mat (mat_t m, const vect_t d, const vect_t d2) |
| void | anim_dirn2mat (mat_t m, const vect_t dx, const vect_t dn) |
| int | anim_steer_mat (mat_t mat, vect_t point, int end) |
| void | anim_add_trans (mat_t m, const vect_t post, const vect_t pre) |
| void | anim_rotatez (fastf_t a, vect_t d) |
| void | anim_mat_print (FILE *fp, const mat_t m, int s_colon) |
| void | anim_mat_printf (FILE *fp, const mat_t m, const char *formstr, const char *linestr, const char *endstr) |
| void | anim_view_rev (mat_t m) |
Definition in file anim.c.
 1.4.6
1.4.6